Task
(TcoTask : ITcoTask)
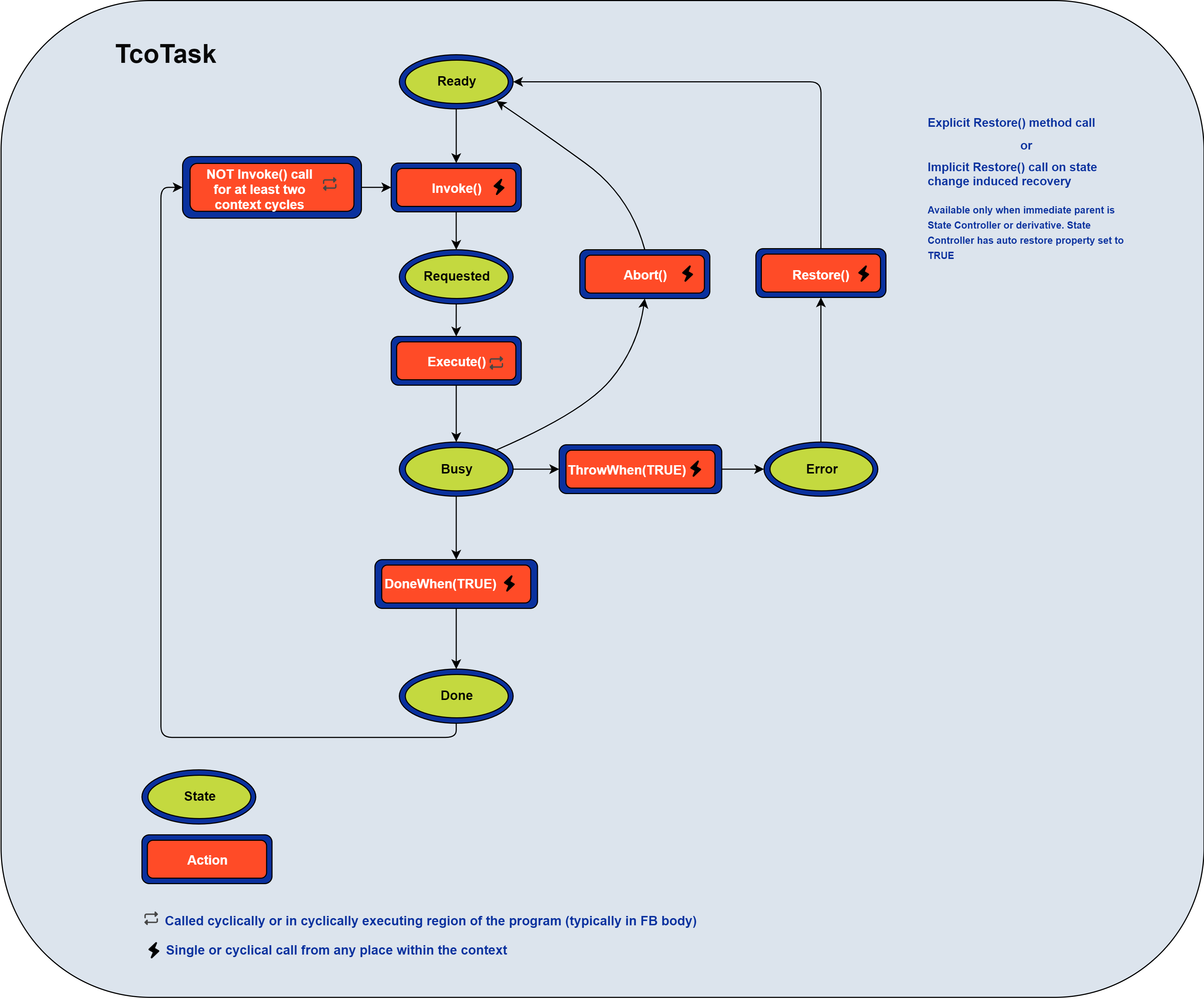
TcoTask is a block for managing chunks of logic in asynchronous execution. Task controls the run of a component's function (servo movement, piston movement, barcode reader trigger, etc.).
There are two key methods for managing the task:
Invokecall to fire the execution of the task (can be called fire&forget or cyclically)Executemethod must be called cyclically (typically in the body of a FB). The method returnsTRUEwhen required the execution from a call ofInvokemethod until the task entersDonestate.
FUNCTION_BLOCK BlocWithATask EXTENDS TcoCore.TcoObject
VAR
_counter : INT;
_myTask : TcoCore.TcoTask(THIS^);
END_IF
// Body of a FB
IF(_myTask.Exectute()) THEN
_counter := _counter + 1;
_myTask.DoneWhen(_counter = 100);
END_IF;
The task executes upon the Invoke method call. Invoke fires the execution of Execute logic upon the first call, and it does not need cyclical calling.
_myTask.Invoke();
Invoke method returns ITcoTaskStatus with the following members:
Busyindicates the execution started and is running.Doneindicates the execution completed with success.Errorindicates the execution terminated with a failure.
// Wait for the task to complete
IF(_myTask.Invoke().Done) THEN
; // Do something
END_IF;
// ALTERNATIVELY
_myTask.Invoke();
IF(_myTask.Done) THEN
; // Do something
END_IF;
// Make sure that the task is executing
IF(_myTask.Invoke().Busy) THEN
; // Do something
END_IF;
// Check for task's error.
IF(_myTask.Invoke().Error) THEN
; // Do something
END_IF;
Restore is a function of IRestoreable (implemented by TcoTask, TcoComponent...) It provides an initialization routine for the object; it recovers the object from any state into Ready.
After task completion, the state of the task will remain in Done, unless:
Task's
Restoremethod is called (task moves toReadystate).Invokemethod is not called for two or more cycles of its context (that usually means the same as PLC cycle); successive call ofInvokewill switch the task intoReadyand immediately toRequestedstate.If the task is part of complex coordination primitive, the transition between states will bring the task into a
Readystate if that primitive (StateController and derivatives) has this option enabled.
The task may finish in an Error state. In that case, two recovery scenarios are possible:
- Task's
Restoremethod is called (task goes toReadystate). Restorefrom on transition methods of a coordination block.