Components
(TcoComponent : ITcoComponent)
The component in TcOpen is a Function Block/class that controls a physical (Robot, Piston, Drive) or virtual (Operator, Warehouse) component.
Another way of thinking about this concept is an API/Driver that allows the consumer to execute and manage a physical or virtual appliance. All components inherit from TcoComponent and all functions are implemented as TcoTask.
Each component implements the logic required to run cyclically in the body of the Function Block. The body of the Function Block must be called from an appropriate place in the PLC program.
The methods that perform actions MUST return TcoCore.ITcoTaskStatus (typically TcoCore.TcoTask). This rule applies even to the logic that requires a single-cycle execution.
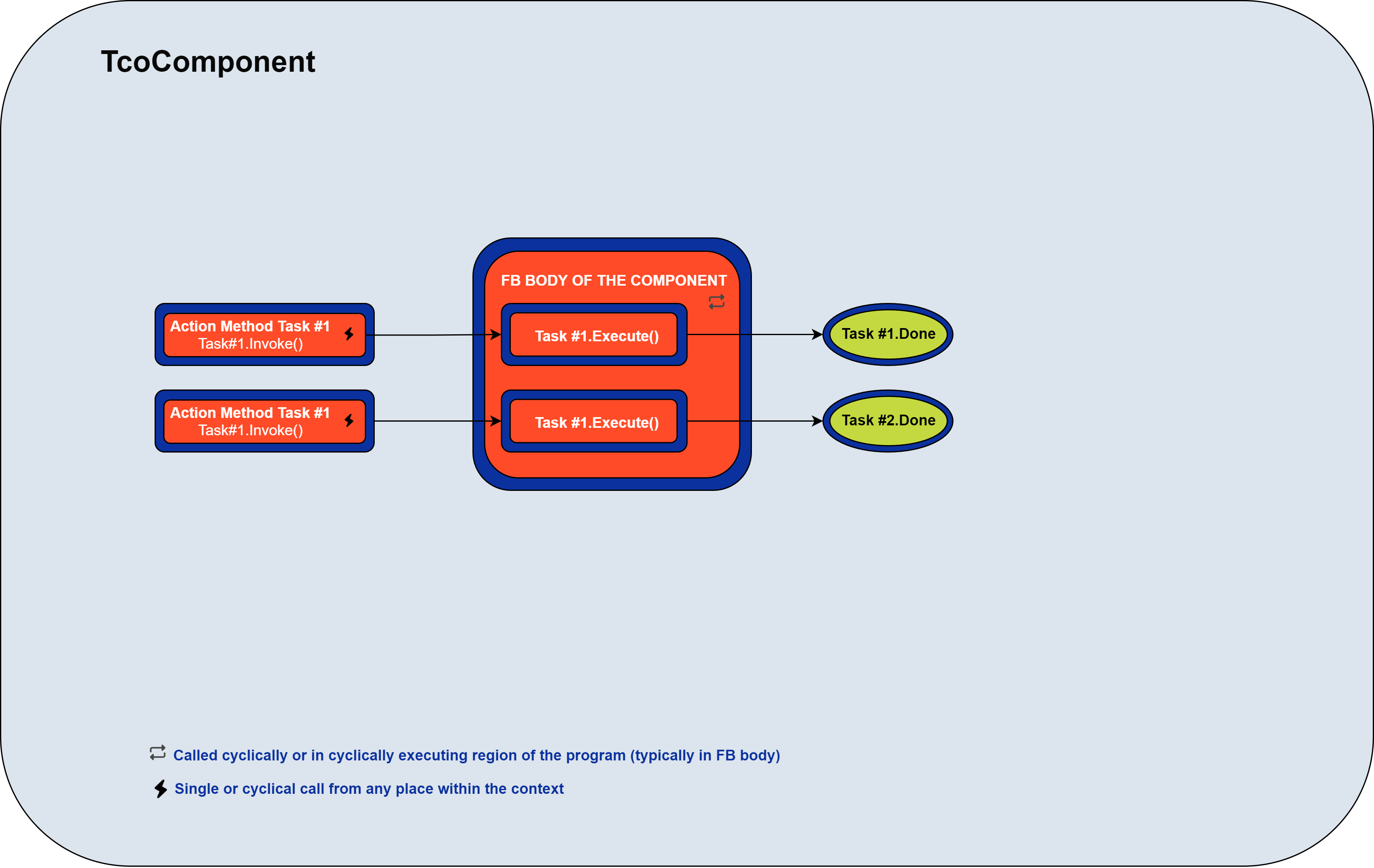
Simple pneumatic cylinder component
Tasks specify what actions the cylinder performs. Implementation of tasks is clearly separated.
Methods enable users to invoke these actions via public API.
FUNCTION_BLOCK PneumaticCylinder EXTENDS TcoCore.TcoComponent, IMPLEMENTS IPneumaticCylinder
VAR_INPUT
inHomeSensor : BOOL;
inWorkSensor : BOOL;
END_VAR
VAR_OUTPUT
outMoveHomeSignal : BOOL;
outMoveWorkSignal : BOOL;
END_VAR
VAR
_MoveHomeTask : TcoCore.TcoTask(THIS^);
_MoveWorkTask : TcoCore.TcoTask(THIS^);
END_VAR
//--------------------------------------------------------
FB BODY [CYCLIC CALL]
//--------------------------------------------------------
IF(_MoveHomeTask.Execute()) THEN
outMoveHomeSignal := TRUE;
outMoveWorkSignal := FALSE;
_MoveHomeTask.DoneWhen(inHomeSensor);
END_IF;
IF(_MoveWorkTask.Execute()) THEN
outMoveHomeSignal := FALSE;
outMoveWorkSignal := TRUE;
_MoveWorkTask.DoneWhen(inWorkSensor);
END_IF;
//--------------------------------------------------------
MoveHome Method
//--------------------------------------------------------
METHOD PUBLIC MoveHome : ITcoTaskStatus
//----
MoveHome := _MoveHomeTask.Invoke();
//--------------------------------------------------------
MoveWork Method
//--------------------------------------------------------
METHOD PUBLIC MoveWork : ITcoTaskStatus
//----
MoveWork := _MoveWorkTask.Invoke();
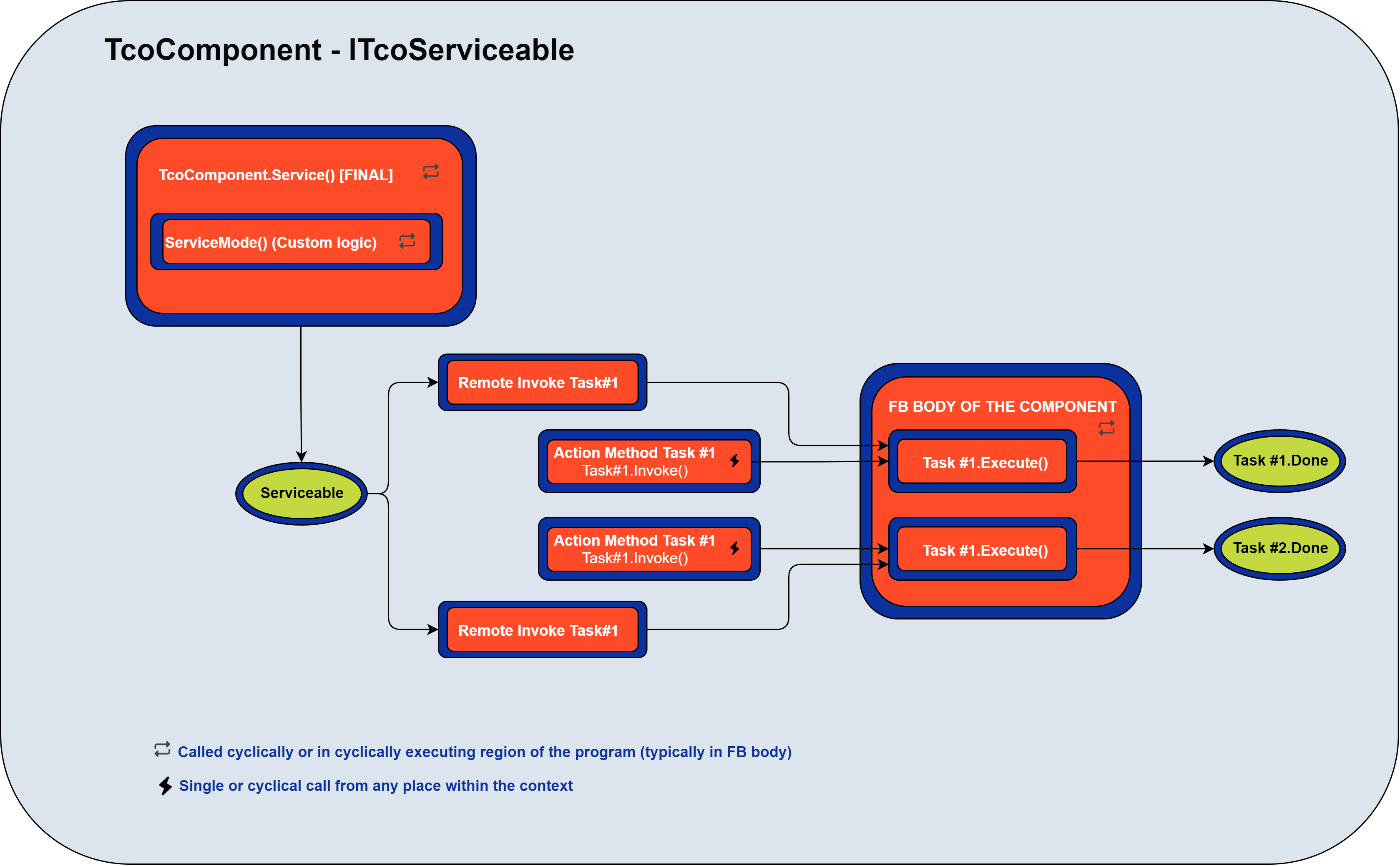
Serviceablity
Serviceability means that the task's execution can be triggered from outside the PLC environment (HMI/SCADA).
All tasks declared in the component will become serviceable when TcoComponent.Service() method is called cyclically.
The Service method is final and cannot be overridden; you can, however, place custom logic in the override of ServiceMode method; its call is ensured by Service method.
The serviceable mode would be typically used in the manual mode of a unit.
TcoComponent implements ITcoServiceable interface.